Одним из актуальных направлений нанотехнологии является создание
микроманипуляторов. Японские ученые создали управляемые лазерным лучом микропинцеты и
микроиглы для работы в жидких средах.
Потребности динамично развивающейся нанотехнологии обуславливают необходимость создания
устройств для работы с микро- и нанообъектами. Уже появились наноманипуляторы из углеродных
нанотрубок, наноиглы, различного рода нанопинцеты для захвата и перемещения кластеров и
наночастиц, для электрических измерений наноприборов. Принцип их работы основан на
электростатических силах, поэтому они не могут работать в жидких средах, и неудобны для работы с
живыми организмами. Но есть возможность работать и в таких условиях.
Мы уже писали про возможность
создания микрообъектов требуемой формы путем полимеризации клейкой массы. Недавно с помощью
подобного метода двухфотонной микростереолитографии исследователи из университета в Нагойе
изготовили пинцет и иглу. Ученые использовали титан-сапфировый лазер (l
= 763 нм, длительностью импульс 130 фс, частотой повторения 8 МГц); cначала
неподвижную ось и ограничители полимеризовали круговым сканированием лазерного пучка со
снижением фокальной плоскости. Затем формировали кольцевую часть ножки пинцета, саму ножку -
наращиванием дуг с увеличением радиуса и, наконец, субмикронный наконечник – ряд точек (рис. 1). В
процессе полимеризации детали плавают в смоле, вязкость которой удерживает их на месте. Длина
наконечников пинцета 1.8 мкм, диаметр - 250 мкм, а время их наращивания - 6 мин.
Пинцет приводился в движение с помощью этого же лазера, работающего в режиме непрерывной
генерации. В первом варианте одна ножка пинцета была объединена с осью, вторая захватывалась
фокусом лазера и передвигалась вместе с ним. В отличие от электростатического пинцета, быстро
смыкающегося при достижении порогового напряжения, движение ножки пинцета точно контролируется
заданным положением фокуса на всей траектории. Точность установки положения пинцета - около 15 нм,
а удерживающее усилие пинцета регулируется при перемещении фокуса вдоль ножки.
Исследователи пробовали изготовлять микромеханизмы с большей свободой перемещения одним
сфокусированым лучом. На рис. 2 показано изображение микроиглы с двумя степенями свободы и схема
"лазерного привода". Ученые опробовали два вида движения иглы - линейное перемещение на 6.8 мкм и
вращение со скоростью 34 об/мин при мощности лазера 200 мВт. Была экспериментально установлена
пропорциональность скоростей линейного и вращательного движения иглы мощности лазера. С
помощью подобной иглы было продемонстрировано насаживание микрочастицы на острие и ее
перемещение в жидкости. Японские исследователи планируют совмещение описанных манипуляторов с
трехмерными полимерными микрожидкостными системами для применения их в бионанотехнологии,
например, в аппаратурe для нанохирургии живых клеток и в системах наноанализа на одиночных
молекулах.
Источник информации - бюллетень ПерсТ, выпуск 5 за 2003 г.
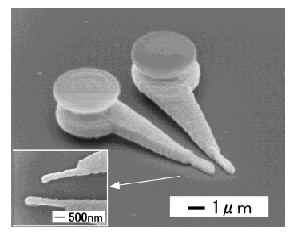
Рис. 1. Микропинцет.
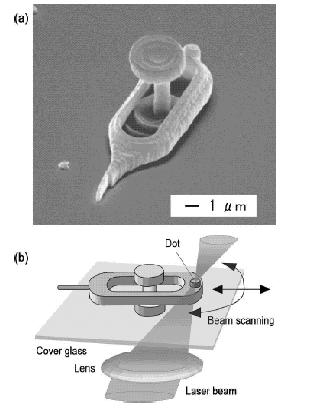
Рис. 2. a - изображение микроиглы, полученное с помощью сканирующей электронной
микроскопии; b - схема "лазерного привода".